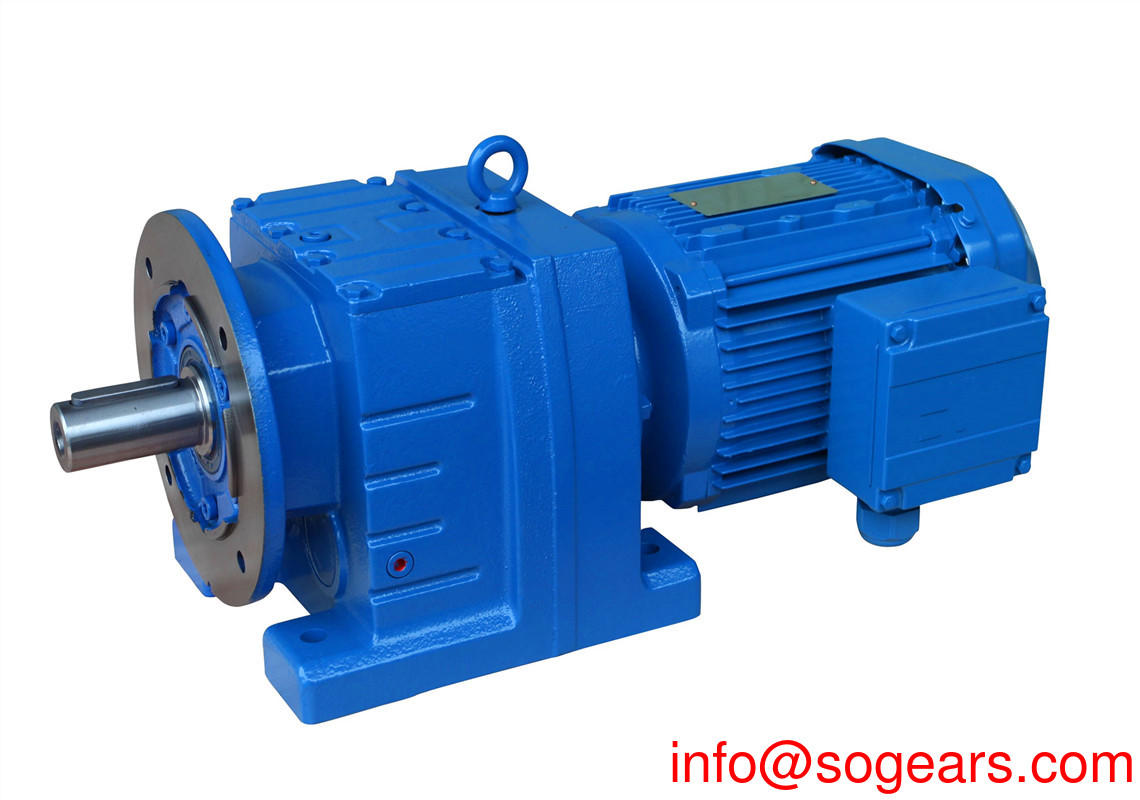
פּלאַנעטאַרי גאַנג מאָטאָרס

סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס
די סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס איז דער הויפּט קאַנסטראַקטאַד מיט אַ זון גאַנג, אַ פּלאַנאַטערי גאַנג, אַ ינער רינג גאַנג און אַ פּלאַנעט טרעגער.
אין סדר צו יוואַנלי פאַרשפּרייטן די לאָודז פון די דריי פּלאַנעט ווילז, אַ טאָאָטעד פלאָוטינג מעקאַניזאַם איז געניצט, דאָס הייסט, די זון גאַנג אָדער די פּלאַנעט טרעגער פלאָוץ, אָדער ביידע די זון גאַנג און די פּלאַנעט טרעגער לאָזנ שווימען אין דער זעלביקער צייט. די גירז אין די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס זענען גלייך צאָן ינוואַלווד סילינדריקאַל גירז. האט די פאלגענדע קעראַקטעריסטיקס:
- קליין אין גרייס און ליכט אין וואָג. אונטער די זעלבע טנאָים, עס איז 1 / 2 אָדער מער לייטער ווי דער פּראָסט ינוואַלווד סאַלינדריקאַל גירבאַקס, און דער באַנד איז 1 / 2 צו 1 / 3.
2, די טראַנסמיסיע עפעקטיווקייַט איז הויך: די סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס מאָטאָר בינע ריטשאַז 97% ~ 98%; צוויי-בינע סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס ריטשאַז 94% ~ 96%; דריי-בינע סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס 91% ~ 94%.
3, די טראַנסמיסיע מאַכט קייט איז גרויס: קענען זיין ווייניקער ווי 1KW צו 1300KW, אָדער אפילו גרעסערע.
4, די טראַנסמיסיע קייט איז גרויס: i = 2.8 ~ 2000
5, אַדאַפּטאַבילאַטי און געווער. די הויפּט פּאַרץ זענען געמאכט פון הויך-קוואַליטעט צומיש שטאָל דורך קאַרבערייזינג און קווענטשינג אָדער ניטרידינג. די פּלאַנאַטערי גירבאַקס סטעפּער מאָטאָר ראַנז סמודלי, מיט נידעריק ראַש און איז געניצט פֿאַר מער ווי 10 מאל.
6, נוצן און אָנווענדלעך טנאָים

די סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס האט דריי האָריזאָנטאַל סעריע (NGW11-NGW121) און צוויי לעוועלס (NGW42-NGW122) דריי (NGW73-NGW123). עס איז דער הויפּט געניצט אין מעטאַללורגי, מיינינג, ליפטינג און טראַנספּערטיישאַן מאַשינערי און עקוויפּמענט, און קענען אויך זיין געניצט פֿאַר מאַכט טראַנסמיסיע אונטער אנדערע ענלעך ינדאַסטריאַל און מיינינג טנאָים.


סערוואָ פּלאַנאַטערי גירבאַקס רייטאַד אַרייַנשרייַב גיכקייַט אַרויף צו 18000 רפּם (וועגן סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס זיך גרייס, די גרעסערע די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס, דער קלענערער די רייטאַד אַרייַנשרייַב ספּידז) אויבן, ינדאַסטרי-מיינונג סערוואָ פּלאַנאַטערי גירבאַקס רעזולטאַט טאָרק איז בכלל נישט מער ווי 2000 נם, ספּעציעל גרויס טאָרק סערוואָ פּלאַנאַטערי גירבאַקס קענען טאָן מער ווי 10000 נם. ארבעטן טעמפּעראַטור אין 25 ℃ צו 100 ℃ אָדער אַזוי, דורך טשאַנגינג שמירן קענען טוישן זייַן אַרבעט טעמפּעראַטור.
די אַפּערייטינג טעמפּעראַטור פון די סערוואָ פּלאַנאַטערי גאַנגבאַקס איז בכלל פֿון -25 ℃ צו וועגן 100 ℃. די מאַקסימום אַרייַנשרייַב גיכקייַט קענען דערגרייכן 18000rpm ארבעטן לעבן. די קיומיאַלאַטיוו אַרבעט צייט פון די רייטאַד אַרייַנשרייַב גיכקייַט איז zbj19004-88 און zbj19026-90 ראַש ≤70 db
וועגווייַזער
1 סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס
2 ינסטאַלירונג אופֿן
3 וויכטיק פּאַראַמעטערס
4 דער באַגריף
סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס

די הויפּט טראַנסמיסיע סטרוקטור איז: פּלאַנעט ראָד, זון ראָד, ויסווייניקסט גאַנג רינג.קאַמפּערד מיט אנדערע רעדוקציע גאַנג, סערוואָ מאָטאָר רעדוקציע גאַנג האט הויך רידזשידאַטי, הויך פּינטלעכקייַט (איין בינע קענען דערגרייכן ווייניקער ווי 1 פונט), (טאָפּל בינע קענען דערגרייכן ווייניקער ווי 3 פונקטן), הויך טראַנסמיסיע עפעקטיווקייט (איין בינע אין 95-99%) הויך טאָרק / באַנד פאַרהעלטעניש, לעבן וישאַלט-פֿרייַ פֿעיִקייטן.
ווייַל פון די קעראַקטעריסטיקס, סערוואָ פּלאַנאַטערי גאַנגבאַקס איז מערסטנס אינסטאַלירן אין די סטעפּער מאָטאָר און סערוואָ מאָטאָר אָדער ברושלעסס מאָטאָר, וואָס איז רידוסט צו פֿאַרבעסערן די גיכקייַט, פֿאַרבעסערן די טאָרק און גלייך ינערשאַ.
סערוויד פּלאַנאַטערי גירבאַקס רייטאַד אַרייַנשרייַב גיכקייַט קענען דערגרייכן אַרויף צו 18000rpm (שייך צו די גרייס פון די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס זיך, די גרעסערע די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס, דער קלענערער די רייטאַד אַרייַנשרייַב גיכקייַט), דער רעזולטאַט טאָרק פון די ינדאַסטריאַל מיינונג סערוואָ פּלאַנאַטערי געאַרבאָקס בכלל טוט נישט יקסיד 2000Nm

ינסטאַללאַטיאָן אופֿן
ריכטיק ינסטאַלירונג, נוצן און וישאַלט פון סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס איז אַ וויכטיק לינק צו ענשור נאָרמאַל אָפּעראַציע פון מעטשאַניקאַל עקוויפּמענט.דעריבער, ווען ינסטאָלינג די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס, ביטע זיין זיכער צו נאָכפאָלגן די פאלגענדע ינסטאַלירונג און נוצן פון שייַכות ענינים שטרענג, אַסעמבאַל און נוצן.
דער ערשטער שריט איז צו באַשטעטיקן צי די פּלאַנאַטערי גירבאַקס מאָטאָר און סטעפּער מאָטאָר זייַנען אין אַ גוטן צושטאַנד איידער ינסטאַלירונג, און שטרענג קאָנטראָלירן צי די גרייס פון יעדער טייל פארבונדן מיט די פּלאַנאַטערי גירבאַקס מאָטאָר און סטעפּפּער מאָטאָר איז גלייַכן. דאָ זענען די גרייס און וואָס ריכטן טאָלעראַנץ פון די פּאַזישאַנינג באַלעבאָס, אַרייַנשרייַב שטיל און סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס נאָרע פון די מאָטאָר.
טרעטן קסנומקס: ונסקרעוו די שרויף אויף די ויסווייניקסט שטויבפּראָאָף לאָך פון סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס פלאַנדזש, סטרויערן די קלאַמערן רינג פון פּקס סיסטעם צו ייַנרייען די זייַט לאָך מיט די שטויבפּראָאָף לאָך, אַרייַנלייגן די ינער כעקסאַגאַן צו פאַרשטייַפן.נאָך דעם, אַראָפּנעמען די מאָטאָר שטיל שליסלען.די דריט שריט איז צו פאַרבינדן די מאָטאָר געוויינטלעך מיט די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס.די קאָנסענטריסיטי פון דער רעזולטאַט שטיל פון די פּלאַנאַטערי גירבאַקס פון די סטעפּער מאָטאָר און די מאָטאָר אַרייַנשרייַב מוזן זיין קאָנסיסטענט ווען פארבונדן, און די ויסווייניקסט פלאַנדזש פון די צוויי מוזן זיין פּאַראַלעל.אויב די קאָנסענטריסיטי איז נישט קאָנסיסטענט, די מאָטאָר שטיל וועט זיין צעבראכן אָדער סטעפּער מאָטאָר פּלאַנאַטערי גאַנג גאַנג גאַנג.אין די ינסטאַלירונג, טאָן ניט נוצן האַמער און אנדערע בלאָוז, פאַרמייַדן די אַקסיאַל קראַפט אָדער ריידיאַל קראַפט צו פיל שעדיקן צו די שייַכעס אָדער גאַנג.


זיין זיכער צו פאַרשטייַפן די מאַונטינג ריגל איידער פאַרשטייַפן די קראַפט ריגל.ווישן אַוועק די אַנטי-זשאַווער בוימל פון די מאָטאָר אַרייַנשרייַב שטיל איידער ינסטאַלירונג, פּאַזישאַנינג באַלעבאָס און קאַנעקטינג טייל פון די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס מיט גאַזאָלין אָדער צינק סאָדיום וואַסער.דער ציל איז צו ענשור ענג פֿאַרבינדונג און בייגיקייט פון אָפּעראַציע און פאַרמייַדן ומנייטיק טראָגן און טרער.איידער מאָטאָר און סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס זענען פארבונדן, די מאָטאָר שטיל קייווייַ זאָל זיין פּערפּענדיקולאַר צו די טייטנינג ריגל.צו ענשור אַ מונדיר קראַפט, ערשטער שרויף די ינסטאַלירונג באָלץ אין קיין דיאַגאָנאַל שטעלע, אָבער נישט שרויף ענג, און שרויף די ינסטאַלירונג באָלץ אין די אנדערע צוויי דיאַגאָנאַל שטעלעס, און לעסאָף שרויף די פיר ינסטאַלירונג באָלץ איינער פֿאַר איינער.לעסאָף פאַרשטייַפן די קראַפט ריגל.כל טייטנינג באָלץ זאָל זיין פאַרפעסטיקט און אָפּגעשטעלט דורך די טאָרק טעלער האַנט לויט די ינדאַקייטיד טאָרק דאַטן.
ריכטיק ינסטאַלירונג צווישן סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס און מעטשאַניקאַל עקוויפּמענט איז די זעלבע ווי ריכטיק ינסטאַלירונג צווישן סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס און פאָר מאָטאָר.דער שליסל איז צו ענשור אַז דער רעזולטאַט שטיל פון די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס און די פאָר טייל פון דער שטיל קאָנסענטריסיטי.
וויכטיק פּאַראַמעטער
דיסעלעריישאַן פאַרהעלטעניש: פאַרהעלטעניש פון אַרייַנשרייַב גיכקייַט און רעזולטאַט גיכקייַט.
סעריע: נומער פון שטעלט פון פּלאַנאַטערי גירז.בכלל מאַקסימום קענען דערגרייכן דרייַ, די עפעקטיווקייַט איז רידוסט.
גאַנץ מאַסע עפעקטיווקייַט: טראַנסמיסיע עפעקטיווקייַט פון סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס אונטער מאַקסימום מאַסע (רעזולטאַט טאָרק פון שולד האַלטן).
אַרבעט לעבן: די קיומיאַלאַטיוו אַרבעט צייט פון די סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס מיט רייטאַד מאַסע און רייטאַד אַרייַנשרייַב גיכקייַט.
רייטאַד טאָרק: עס איז די טאָרק וואָס די רייטאַד לעבן אַלאַוז פֿאַר לאַנג פליסנדיק צייט.ווען די רעזולטאַט גיכקייַט איז 100 ר / מין, די לעבן פון די פּלאַנאַטערי גירבאַקס סטעפּער מאָטאָר איז די דורכשניטלעך לעבן, ווייַטער פון דעם ווערט, די דורכשניטלעך פּלאַנעטאַר גאַנג גאַנגבאָקס פון סטעפּפּער מאָטאָר איז רידוסט.די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס פיילז ווען די רעזולטאַט טאָרק יקסידז צוויי מאָל.
ראַש: אַפּאַראַט דב (א), דעם ווערט איז די אַרייַנשרייַב גיכקייַט פון 3000 ר / מין, קיין מאַסע, 1 ב פון די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאָרד מעאַסורעמענט ווערט.

סעריע: נומער פון פּלאַנעטערי גירז. זינט איין גאַנג פון פּלאַנעטערי גירז קען נישט טרעפן די באדערפענישן פון אַ גרעסערע טראַנסמיסיע פאַרהעלטעניש, עס זענען מאל צוויי אָדער דריי סעטטינגס וואָס דאַרפֿן צו טרעפן די באדערפענישן פון שטיצן פֿאַר אַ גרעסערע טראַנסמיסיע פאַרהעלטעניש. רעכט צו דער פאַרגרעסערן אין די נומער פון פּלאַנאַטערי גירז, די לענג פון די רגע אָדער דריט סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס וועט זיין געוואקסן און די עפעקטיווקייַט וועט זיין דיקריסט.
צוריקקער רעשוס: ווען דער רעזולטאַט סוף איז פאַרפעסטיקט און די אַרייַנשרייַב סוף איז ראָוטייטיד קלאַקווייז און קאַונטערקלאָקווייז צו פּראָדוצירן רייטאַד טאָרק + -קסנומקס% אין די אַרייַנשרייַב סוף, עס איז אַ קליינטשיק ווינקלדיק דיספּלייסמאַנט אין די ינפּוט סוף פון די סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס, וואָס איז דער צוריקקער רעשוס.
סערוואָ מאָטאָר איז אַ מאָטאָר וואָס קאָנטראָלירן די מאַקאַניקאַל קאַמפּאָונאַנץ פליסנדיק אין אַ סערוואָ סיסטעם. עס איז אַן ומדירעקט גיכקייַט ענדערונג מיטל פון אַ העסאָפע מאָטאָר.

סערוואָ מאָטאָר קענען קאָנטראָלירן די גיכקייַט, די אַקיעראַסי פון די שטעלע איז זייער פּינטלעך, די וואָולטידזש סיגנאַל קענען ווערן קאָנווערטעד אין די טאָרק און די גיכקייַט פון די קאָנטראָל כייפעץ.די ראָוטער גיכקייַט פון די סערוואָ מאָטאָר איז קאַנטראָולד דורך די אַרייַנשרייַב סיגנאַל און קענען ריספּאַנד געשווינד. עס איז געניצט ווי אַן עקסעקוטיווע עלעמענט אין די אָטאַמאַטיק קאָנטראָל סיסטעם און האט די קעראַקטעריסטיקס פון קליין ילעקטראָומאַקאַניקאַל צייט קעסיידערדיק, הויך לינעאַריטי און סטאַרטינג וואָולטידזש, עטק.צעטיילט אין דק און אַק סערוואָ מאָטאָרס, די הויפּט קעראַקטעריסטיקס איז אַז, ווען די סיגנאַל וואָולטידזש איז נול, עס איז קיין ראָוטיישאַן דערשיינונג, די ינקריסינג גיכקייַט פון די טאָרק און די מונדיר אַראָפּגיין.
די גרונט אינפֿאָרמאַציע
כינעזיש נאָמען
סערוואָ מאָטאָר
פרעמד נעמען
סערוואָ מאָטאָר
טיפּ ויסריכט
ניצן מאל
אָטאַמאַטיק קאָנטראָל סיסטעם

וועגווייַזער
1 ארבעטן פּרינציפּ
2 אַנטוויקלונג געשיכטע
3 סעלעקציע פאַרגלייַך
4 דיבאַגינג אופֿן
5 פאַרגלייַך פאָרשטעלונג
6 סעלעקציע כעזשבן
7 ברייקינג מאָדע
8 ווייזט פֿאַר ופמערקזאַמקייט
9 פאַרגלייַך פון קעראַקטעריסטיקס
10 פאַרנעם פון נוצן
11 הויפּט פאַנגקשאַנז
12 אַדוואַנטידזשיז
פאָלד רעדאַגירן די אַרבעט פּרינציפּ פון דער אָפּטיילונג
1. סערוואָ מעקאַניזאַם איז געניצט צו מאַכן די שטעלע, אָריענטירונג,

אַ אָטאַמאַטיק קאָנטראָל סיסטעם אין וואָס די פּראָדוקציע קאַנטראָולד קוואַנטיטי, אַזאַ ווי די שטאַט, קענען נאָכגיין אַרביטראַריש ענדערונגען אין די אַרייַנשרייַב ציל (אָדער אַ געגעבן ווערט).סערוואָ פּאַזישאַנינג מיט דויפעק, קענען בייסיקלי פֿאַרשטיין עס, סערוואָ מאָטאָר צו באַקומען אַ דויפעק, און דרייען איין דויפעק פון די קאָראַספּאַנדינג פונט, אַזוי ווי צו פאַרשטיין די דיספּלייסמאַנט, ווייַל די סערוואָ מאָטאָר פונקציאָנירן האט אַ דויפעק, אַזוי יעדער ראָוטיישאַן פון די סערוואָ מאָטאָר ווינקל, שיקן די קאָראַספּאַנדינג נומער פּאַלסיז אין דעם וועג, און די סערוואָ מאָטאָר צו אָננעמען אַ דויפעק פאָרמירונג פון די ווידערקאָל אָדער פֿאַרמאַכט שלייף. דער סיסטעם וועט וויסן ווי פילע פּאַלסיז געשיקט צו די סערוואָ מאָטאָר. ווי פיל טשאַרדזשינג דויפעק צוריק אין דער זעלביקער צייט, אין דעם וועג קענען זיין זייער גענוי קאָנטראָל פון די מאָטאָר ראָוטיישאַן, אַזוי צו דערגרייכן פּינטלעך פּאַזישאַנינג, קענען דערגרייכן די 0.001 מם.דק סערוואָ מאָטאָר איז צעטיילט אין באַרשט און ברושלעסס מאָטאָר.באַרשט מאָטאָר נידעריק פּרייַז, פּשוט סטרוקטור, גרויס אָנהייב טאָרק, ברייט גיכקייַט קייט, גרינג צו קאָנטראָלירן, דאַרפֿן וישאַלט, אָבער וישאַלט איז נישט באַקוועם (טשאַד באַרשט), ילעקטראָומאַגנעטיק ינטערפיראַנס, ינווייראַנמענאַל באדערפענישן.דעריבער עס קענען זיין געוויינט אין קאָסטן-שפּירעוודיק אַלגעמיינע ינדאַסטריאַל און יידל אַפּלאַקיישאַנז.



ברושלעסס מאָטאָר קליין גרייס, ליכט וואָג, גרויס רעזולטאַט, שנעל ענטפער, הויך גיכקייַט, קליין ינערשאַ, גלאַט ראָוטיישאַן, סטאַביל טאָרק.די קאָנטראָל איז קאָמפּלעקס, גרינג צו פאַרשטיין סייכל, און די עלעקטראָניש קאַמיוטיישאַן איז פלעקסאַבאַל, וואָס קענען זיין קוואַדראַט כוואַליע קאַמיוטיישאַן אָדער סינוס כוואַליע קאַמיוטיישאַן.מאָטאָר וישאַלט פריי, הויך עפעקטיווקייַט, נידעריק אַפּערייטינג טעמפּעראַטור, קליין ילעקטראָומאַגנעטיק ראַדיאַציע, לאַנג לעבן, קענען ווערן געניצט אין אַ פאַרשיידנקייַט פון ינווייראַנמאַנץ.
2, אַק סערוואָ מאָטאָר איז ברושלעסס מאָטאָר, צעטיילט אין סינטשראָנאָוס און ייסינגקראַנאַס מאָטאָר, די קראַנט באַוועגונג קאָנטראָל איז יוזשאַוואַלי געניצט סינטשראָנאָוס מאָטאָר, די מאַכט קייט איז גרויס, און קענען מאַכן אַ פּלאַץ פון מאַכט.הויך ינערשאַ, נידעריק מאַקסימום ראָוטיישאַנאַל גיכקייַט און מיט די פאַרגרעסערן פון מאַכט געשווינד דיקריסיז.דעריבער, עס איז פּאַסיק פֿאַר נידעריק גיכקייַט און גלאַט אָפּעראַציע.
3. דער ראָוטער אין די סערוואָ מאָטאָר איז אַ שטענדיק מאַגנעט. די דריי-פאַסע עלעקטרע קאַנטראָולד דורך די שאָפער, ו / וו / וו, פארמען אַן ילעקטראָומאַגנעטיק פעלד.די אַקיעראַסי פון סערוואָ מאָטאָר דעפּענדס אויף די אַקיעראַסי פון ענקאָדער (שורה נומער).
די אַנטוויקלונג געשיכטע
זינט די Indramat אָפּטייל פון די רעקסאָטה פירמע פון דייַטשלאַנד MANNESMANN אין 1978 האַנאָווער האַנדל

די מעק פּערמאַנאַנט מאַגנעט אַק סערוואָ מאָטאָר און פאָר סיסטעם זענען אַפישאַלי באַקענענ אין שאַנגהאַי, וואָס האָט אנגעצייכנט אַז די נייַע דור פון אַק סערוואָ טעכנאָלאָגיע איז אריין אין די פּראַקטיש בינע.ביז די מיטל און שפּעט קסנומקס, קאָמפּאַניעס האָבן גאַנץ פּראָדוקטן.די גאנצע סערוואָ מאַרק איז שיפטאַד צו אַק סיסטעמען.פרי סימיאַליישאַן סיסטעמען אַזאַ ווי נול דריפט, אַנטי-ינטערפיראַנס און רילייאַבילאַטי, אַקיעראַסי און בייגיקייט, ווי גענוג, איז נישט גאָר צופֿרידן מיט די באדערפענישן פון באַוועגונג קאָנטראָל, אין די לעצטע יאָרן ווי דער מייקראָופּראַסעסער, די אַפּלאַקיישאַן פון נייַ טיפּ דיגיטאַל סיגנאַל פּראַסעסער (DSP ), אַ דיגיטאַל קאָנטראָל סיסטעם, די קאָנטראָל טייל קענען זיין גאָר דורכגעקאָכט דורך ווייכווארג, גערופן דק סערוואָ סיסטעם, דריי-פאַסע פּערמאַנאַנט מאַגנעט אַק סערוואָ סיסטעם.

ביז איצט, רובֿ פון די הויך פאָרשטעלונג עלעקטריקאַל סערוואָ סיסטעמען אַדאַפּט פּערמאַנאַנט מאַגנעטיק סינטשראָנאָוס אַק סערוואָ מאָטאָרס, בשעת רובֿ פון די קאָנטראָל דריווערס אַדאַפּט שנעל און פּינטלעך סערוואָ סיסטעמען.טיפּיש מאַניאַפאַקטשערערז אַרייַננעמען Siemens פון דייַטשלאַנד, קאָהלמאָרגען פון די פאַרייניקטע שטאַטן און Panasonic און Yaskawa פון יאַפּאַן.
די קליין אַק סערוואָ מאָטאָר און דרייווער זענען געשאפן דורך יאַסקאַוואַ מאָטאָר אין יאַפּאַן. צווישן זיי, די סעריע איז פּאַסיק פֿאַר קנק מאַשין מכשירים (מאַקסימום גיכקייַט איז 1000r / min, טאָרק איז 0.25 ~ 2.8n.m), און R סעריע איז פּאַסיק פֿאַר ראָובאַץ (מאַקסימום גיכקייַט איז 3000r / min, טאָרק איז 0.016 ~ 0.16n.m ).דערנאָך, זעקס סעריע פון M, F, S, H, C און G זענען באַקענענ.די נייַע די סעריע און די ר סעריע זענען באַקענענ אין די 1990s.פון די אַלט סעריע פון רעקטאַנגגיאַלער כוואַליע פאָר, 8051 MCU קאָנטראָל צו סינוסוידאַל כוואַליע פאָר, 80C, 154CPU און טויער מענגע שפּאָן קאָנטראָל, טאָרק פלאַקטשויישאַן פון 24% צו 7%, און פֿאַרבעסערן די רילייאַבילאַטי.אין דעם וועג, בלויז אַ ביסל יאָרן צו פאָרעם אַכט סעריע (מאַכט קייט פון 0.05 ~ 6kW) לעפיערעך גאַנץ סיסטעם, צו טרעפן די אַרבעט מאַשינערי, האַנדלינג מעקאַניזאַם, וועלדינג ראָובאַץ, פֿאַרזאַמלונג ראָובאַץ, עלעקטראָניש קאַמפּאָונאַנץ, פּראַסעסינג מאַשינערי, דרוק דרוקן, הויך- וויינדינג גיכקייַט, וויינדינג מאַשין און אנדערע באדערפענישן.
פאַנוק, אַ יאַפּאַניש פירמע באַוווסט פֿאַר פּראַדוסינג קנק מאַשין מכשירים, אויך ינטראָודוסט ס-סעריע (קסנומקס ספּעסאַפאַקיישאַנז) און ל-סעריע (קסנומקס ספּעסאַפאַקיישאַנז) שטענדיק מאַגנעט אַק סערוואָ מאָטאָרס אין די מיטן קסנומקס.די ל סעריע האט אַ קליין מאָמענט פון ינערשאַ און מאַקאַניקאַל צייט קעסיידערדיק און איז פּאַסיק פֿאַר סערוואָ סיסטעמען וואָס דאַרפֿן אַ שנעל ענטפער.

אנדערע יאַפּאַניש מאַניאַפאַקטשערערז, אַזאַ ווי מיצובישי מאָטאָרס (hc-kfs, hc-mfs, hc-sfs, hc-rfs and hc-ufs series), Toshiba seiki (SM series), okuma iron works (BL series), Sanyo Electric (BL סעריע סיסטעם, און רישי עלעקטריק (ד סעריע), האָבן אויך אַרייַן די פּערמאַנאַנט מאַגנעט אַק סערוואָ סיסטעם.
די MAC סעריע אַק סערוואָ מאָטאָרס פון די Indramat אָפּטייל פון רעקסראָטה האָבן 7 ראַם סיזעס און 92 ספּעסאַפאַקיישאַנז
די IFT5 סעריע דריי-פאַסע פּערמאַנאַנט מאַגנעט אַק סערוואָ מאָטאָרס פון סיעמענס זענען צעטיילט אין נאָרמאַל טיפּ און קורץ טיפּ

די אַק סערוואָ מאָטאָר און די ברושלעסס דק סערוואָ מאָטאָר איז די דיפעראַנסיז פונקציאָנירן: אַק סערוואָ איז בעסער, ווייַל עס סינוס כוואַליע קאָנטראָל, טאָרק ריפּאַל איז קליין.דק סערוואָ איז אַ טראַפּעזאָידאַל כוואַליע.אבער דק סערוואָ איז סימפּלער און טשיפּער.
די מאַקסימום גיכקייַט פון דער שטיל גיכקייַט שטיל טוט נישט יקסיד 1500r / min
די פּעריפעראַל גיכקייַט פון דעם גאַנג איז נישט יקסיד 10m / s;
ארבעטן סוויווע טעמפּעראַטור איז -קסנומקס ° C -40 ° C;
עס קענען זיין אַפּערייטאַד אין ביידע פֿאָרווערטס און פאַרקערט אינסטרוקציעס.

סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס פּאַראַמעטערס:
NGW איין-בינע סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס: NGW11, NGW21, NGW31, NGW41, NGW51, NGW61, NGW71, NGW81, NGW91, NGW101, NGW111, NGW121, NGWXNUMX
NGW צוויי-בינע סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122
NGW דריי-בינע סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס: NGW73, NGW83, NGW93, NGW103, NGW113, NGW123



NGW סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס ספּעסאַפאַקיישאַנז:
די ספּעסאַפאַקיישאַנז פון די סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס זענען צעטיילט אין די 12 ראַם נומערן לויט די טראַנסמיסיע פאַרהעלטעניש, מאַכט און טאָרק און איין-בינע, טאָפּל-בינע און דריי-בינע טראַנסמיסיע. עס זענען 27 ראַם נומערן און 58 גיכקייַט ריישיאָוז. די דעטאַילס זענען ווי גייט:
סטעפּפּער מאָטאָר פּלאַנאַטערי גירבאַקס זענען צעטיילט אין איין-בינע, טאָפּל-בינע און דריי-בינע טראַנסמיסיע: איין-בינע מאָדעלס זענען: NGW11 סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס NGW21, NGW31, NGW41, NGW51 סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס NGW61, NGW71, NGW81, NGW91, NGW101, NGW111 , NGW121, NGWXNUMX;

דעבוג אופֿן
1. יניטיאַליזאַטיאָן פּאַראַמעטערס
יניטיאַליזירן די פּאַראַמעטערס איידער וויירינג.
אויף די קאָנטראָל קאַרטל: סעלעקטירן דעם קאָנטראָל מאָדע;באַשטעטיק PID פּאַראַמעטערס צו נול;אויב די קאָנטראָל קאָרט איז פּאַוערד, ניט ויסצאָלן דורכפירונג פון די געבן סיגנאַל;היט דעם שטאַט צו ענשור אַז די קאָנטראָל קאַרטל איז אין דעם שטאַט ווען עס איז פּאַוערד ווידער.
אויף די סערוואָ מאָטאָר: שטעלן די קאָנטראָל מאָדע;באַשטעטיק צו געבן פונדרויסנדיק קאָנטראָל;דער גאַנג פאַרהעלטעניש פון די קאָד סיגנאַל רעזולטאַט;שטעלן די פּראַפּאָרשאַנאַל שייכות צווישן די קאָנטראָל סיגנאַל און די מאָטאָר ספּיד.אין אַלגעמיין, עס איז רעקאַמענדיד אַז די מאַקסימום פּלאַן גיכקייַט פון די סערוואָ אָפּעראַציע שטימען צו די קאָנטראָל וואָולטידזש פון 9V.למשל, יאַמיאַנג שטעלט די גיכקייַט קאָראַספּאַנדינג צו 1V וואָולטידזש און די פאַבריק ווערט 500. אויב איר נאָר ווילן די מאָטאָר צו אַרבעטן אונטער 1000 רפּם, שטעלן דעם פּאַראַמעטער צו 111.


2, קשר
מאַכט אַוועק די קאָנטראָל קאַרטל און פאַרבינדן די סיגנאַל שורה צווישן די קאָנטראָל קאַרטל און די סערוואָ.די ווייַטערדיקע שורות מוזן זיין פארבונדן: אַנאַלאָג רעזולטאַט שורה פון קאָנטראָל קאָרט, געבן סיגנאַל שורה, ענקאָדער סיגנאַל שורה סערוואָ רעזולטאַט.די מאָטאָר און די קאָנטראָל קאַרטל (און די פּיסי) זענען פּאַוערד נאָך די וויירינג איז ריטשעקטיד צו זיין ריכטיק.אין דעם פונט, דער מאָטאָר זאָל זיין סטיישאַנערי און קענען זיין לייכט אויסגעדרייט דורך פונדרויסנדיק פאָרסעס. אויב נישט, קאָנטראָלירן די באַשטעטיקן און וויירינג פון די ענייבאַלינג סיגנאַל.דרייען די מאָטאָר מיט פונדרויסנדיק קראַפט, קאָנטראָלירן צי די קאָנטראָל קאָרט קענען ריכטיק דיטעקט די ענדערונג אין די שטעלע פון די מאָטאָר, אַנדערש קאָנטראָלירן די וויירינג און באַשטעטיקן פון די ענקאָדער סיגנאַל

3. פּרוּווט די ריכטונג
פֿאַר אַ פֿאַרמאַכט שלייף קאָנטראָל סיסטעם, אויב די באַמערקונגען סיגנאַל איז נישט אין די רעכט ריכטונג, די קאַנסאַקווענסאַז מוזן זיין דיזאַסטראַס.געבן סיגנאַל צו קאָנטראָלירן סערוואָ דורך קאָנטראָל קאַרטל.דער סערוואָ זאָל דרייען מיט אַ נידעריקער גיכקייַט, וואָס איז די לעדזשאַנדערי "נול דריפט".אויף די קאָנטראָל קאָרט זענען ינסטראַקשאַנז אָדער פּאַראַמעטערס צו פאַרשטיקן נול דריפט.ניצן דעם ינסטרוקטיאָן אָדער פּאַראַמעטער צו זען אויב די גיכקייַט און ריכטונג פון די מאָטאָר קענען זיין קאַנטראָולד דורך דעם לימעד (פּאַראַמעטער).אויב עס קען נישט זיין קאַנטראָולד, קאָנטראָלירן די אַנאַלאָג וויירינג און די פּאַראַמעטער באַשטעטיקן קאָנטראָל קאָנטראָל מאָדע.באַשטעטיקן אַ positive נומער, מאָטאָר פאָרויס ראָוטיישאַן, ענקאָדער ציילן פאַרגרעסערן;געגעבן אַ נעגאַטיוו נומער, די מאָטאָר טורנס צוריק און די קאָדירונג ציילן דיקריסיז.אויב די מאָטאָר איז לאָודיד און די מאַך איז לימיטעד, טאָן ניט נוצן דעם אופֿן.טעסטינג טאָן ניט געבן צו פיל וואָולטידזש, רעקאַמענדיד אונטער 1V.אויב דער ריכטונג איז סתירה, די פּאַראַמעטערס פון די קאָנטראָל קאָרט אָדער מאָטאָר קענען זיין מאַדאַפייד צו מאַכן זיי קאָנסיסטענט.

4. ינכיבאַט נול דריפט
אין דער שלאָס-קאָנטראָל קאָנטראָל פּראָצעס, די עקזיסטענץ פון נול דריפט וועט האָבן אַ זיכער השפּעה אויף די קאָנטראָל ווירקונג, און עס איז בעסער צו צאַמען עס.קאָנטראָל קאַרטל אָדער סערוואָ קאָנטראָל פּאַראַמעטערס צו קאָנטראָלירן נול דריפט, קערפאַלי אַדזשאַסטיד אַזוי אַז די מאָטאָר גיכקייַט איז נאָענט צו נול.ווייַל נול דריפט זיך אויך האט אַ זיכער גראַד פון ראַנדאַמנאַס, אַזוי עס איז ניט נייטיק צו דאַרפן די מאָטאָר ספּידז איז לעגאַמרע נול.
5. פאַרלייגן קאָנטראָל פֿאַרמאַכט
די סערוואָ סיגנאַל איז ווידער רעלעאַסעד דורך די קאָנטראָל קאַרטל, און אַ קליין פּראַפּאָרשאַנאַל געווינס איז אַרייַנשרייַב אויף די קאָנטראָל קאַרטל. ווי קליין די געווינס איז, דאָס קען זיין באשלאסן בלויז דורך געפיל. אויב איר זענט נישט אַשורד, אַרייַן די מינימום ווערט ערלויבט דורך די קאָנטראָל קאַרטל.קער אויף די געבן סיגנאַל פון די קאָנטראָל קאַרטל און די סערוואָ.אין דעם פונט, דער מאָטאָר זאָל קענען צו בעערעך נאָכפאָלגן די באַוועגונג ינסטראַקשאַנז.

6. סטרויערן די פארמאכט שלייף פּאַראַמעטערס
קאָנטראָלירן די קאָנטראָל פּאַראַמעטערס צו ענשור אַז דער מאָטאָר איז מאָווינג לויט די ינסטרוקטיאָנס פון די קאָנטראָל קאַרטל, און דער טייל פון דער אַרבעט, מער דערפאַרונג, קענען בלויז זיין איבערגעהיפּערט.
פאַרלייגן, פאַרגלייכן די אָפּטיילונג פאַרגלייַך
פאָרשטעלונג פאַרגלייַך צווישן סערוואָ מאָטאָר און סטעפּינג מאָטאָר

סטעפּפּער מאָטאָר, ווי אַן אָפֿן-שלייף קאָנטראָל סיסטעם, איז אַ יקערדיק שייכות מיט מאָדערן דיגיטאַל קאָנטראָל טעכנאָלאָגיע.סטעפּפּינג מאָטאָר איז וויידלי געניצט אין טשיינאַ מיט די דיגיטאַל קאָנטראָל סיסטעם.מיט די אויסזען פון אַלע-דיגיטאַל אַק סערוואָ סיסטעם, די אַק סערוואָ מאָטאָר איז מער און מער געווענדט אין דיגיטאַל קאָנטראָל סיסטעם.אין סדר צו אַדאַפּט זיך צו דער אַנטוויקלונג גאַנג פון דיגיטאַל קאָנטראָל, סטעפּפּער מאָטאָר אָדער פול דיגיטאַל אַק סערוואָ מאָטאָר איז געניצט ווי יגזעקיאַטיוו מאָטאָר אין באַוועגונג קאָנטראָל סיסטעם.כאָטש די צוויי זענען ענלעך אין קאָנטראָל מאָדע (דויפעק באַן און ריכטונג סיגנאַל), עס זענען באַטייטיק דיפעראַנסיז אין פאָרשטעלונג און אַפּלאַקיישאַן.מאַכן אַ פאַרגלייַך מיט רעספּעקט צו די סערוויס פאָרשטעלונג פון ביידע איצט.

די טראַנסמיסיע פאַרהעלטעניש איז: 2.0, 3.15, 3.55, 4, 4.5, 5, 5.6, 6.3, 7, 1.8, 9, 10, 11.2, 12.5;
צוויי-בינע מאָדעלס זענען: NGW42, NGW52, NGW62, NGW72, NGW82, NGW92, NGW102, NGW112, NGW122;
די טראַנסמיסיע פאַרהעלטעניש איז: 14, 16, 18, 20, 22.4, 25, 28, 31.5, 35.5, 40, 45.50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160, XNUMX, XNUMX, XNUMX, XNUMX

די דריי-מדרגה מאָדעלס זענען: NGW73, NGW83, NGW93, NGW103 גאַנג סטעפּער מאָטאָר פּלאַנאַטערי גירבאַקס NGW113, NGW123 סטעפּער מאָטאָר פּלאַנאַטערי גאַנגבאַקס;
די טראַנסמיסיע פאַרהעלטעניש איז: 180, 200, 224, 250, 280, 315, 355, 400













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![]()
דער בעסטער דינסט פון אונדזער טראַנסמיסיע פאָר עקספּערט צו דיין ינבאָקס גלייַך.
אונדזער דינסט
באַקומען אין ריר
Yantai Bonway Manufacturer קאָ.לטד
אַנאָ.160 טשאַנגדזשיאַנג ראָוד, יאַנטאַי, שאַנדאָנג, טשיינאַ (264006)
ה + 86 535 6330966
W + 86 185 63806647